4 Technologien Infrastruktur
4.1 Sensorkonten
SICK erarbeitet infrastrukturbasierte Umfelderfassungssysteme zur Erfassung von nicht-automatisierten Objekten in der Automatisierungszone (z. B. Personen, nichtausgerüstete Fahrzeuge, Güter, etc.). Ziel ist die Erprobung und Bewertung (technisch und wirtschaftlich) verschiedener Sensortypen (Lidar, Radar) unter Aspekten der funktionalen Sicherheit zur Sicherstellung des aufgestellten Sicherheitskonzeptes. Dazu werden die verschiedenen Sensortypen an strategisch günstigen Orten innerhalb der Automatisierungszone positioniert, um eine hinreichende Abdeckung zur Ortung von relevanten Objekten zu gewährleisten. Die Platzierung der Sensorknoten soll zunächst mithilfe von Simulationen unterstützt und anschließend nach einem definierten Vorgehen exemplarisch am für SAFE20 ausgewählten Verladehof aufgebaut und betrieben werden. Ein besonders wichtiger Arbeitspunkt ist hier die Kalibrierung der Sensorknoten relativ zum Einheitskoordinatensystem der Automatisierungszone.
Aufgrund des sehr unterschiedlichen Blickwinkels der Sensoren im Vergleich zu den Anbaupositionen an Fahrzeugen (in der Infrastruktur eher von oben auf das Szenario, an Fahrzeugen eher parallel zur Fahrbahn), müssen hier deutlich andere Algorithmen zur Objektextraktion aus den jeweiligen Rohdaten (Lidar, Radar, ggf. Kamera) erarbeitet werden. Ähnlich verhält es sich bei den Tracking-Algorithmen, da von anderen Randbedingungen der Referenzpunktfindung ausgegangen werden muss. Die Bereitstellung der Ergebnisse erfolgt auch hier, analog zur Umfelderfassung auf mobilen Plattformen, in standardisierten Objektlisten.
4.2 Leitsystem
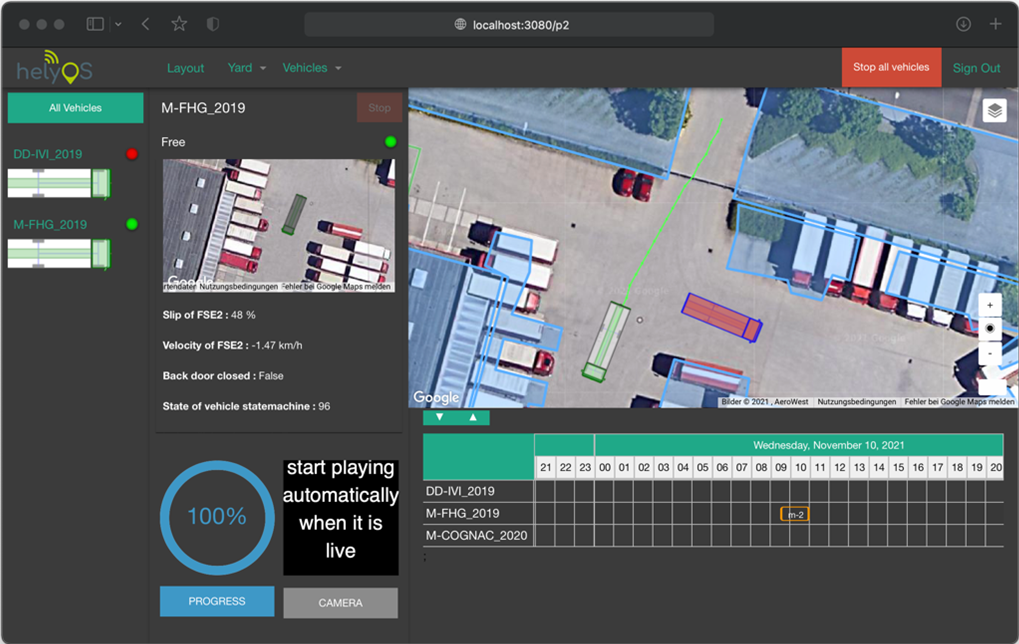
Das Fraunhofer IVI entwickelt eine Leitstandsoftware, die logistische Arbeitsaufgaben wie „Bringe Wechselbrücke 223 zu Laderampe 42“ in maschinenlesbare Missionen für automatisierte Fahrzeuge und Fahrzeugflotten übersetzt. Die Software schickt die erstellten Missionen wahlweise über WiFi oder eine 4G/5G-Verbindung an die Fahrzeuge und tauscht während der Durchführung in Echtzeit Informationen mit ihnen aus. Auf diese Weise kann der Leitstand den Missionsfortschritt überwachen und Störungen an einen Bediener zurückmelden.
Im Inneren des Leitstands steckt mit helyOS® die eigentliche Innovation – ein neuartiges Framework für die Entwicklung von Leitstand-Software (engl. Control Tower Software). Durch den Einsatz von helyOS® lässt sich die Entwicklungszeit von anwendungsspezifischer Leitstandsoftware deutlich reduzieren. Dabei ist das Framework für autonomes Fahren auf Betriebshöfen, in Logistikzentren, in Häfen und Flughäfen sowie in der Landwirtschaft geeignet.
Möglich macht das die intelligente, modulare Architektur von helyOS®, die sich konsequent an drei Leitgedanken ausrichtet:
- helyOS® soll den Gleichanteil der unterschiedlichen Anwendungsfelder abbilden. Dazu zählen a. das An-/Abmelden von Fahrzeugen und Maschinen, eine bidirektionale Kommunikation sowie das Erstellen, Übertragen und Überwachen von Missionen.
- helyOS® soll es Entwicklern ermöglichen, den Funktionsumfang einer konkreten Leitstandsoftware über funktionale Plug-Ins (sog. Micro Services), die auch Dritte bereitstellen können, schnell und effizient zu konfigurieren.
- helyOS® -basierte Leitstandsoftware soll sowohl in internen Netzwerken als auch in der Cloud lauffähig sein.
Damit richtet sich helyOS® klar an Softwareentwickler, die künftig schneller und effizienter Leitstandsoftware entwickeln wollen. Es ist geplant, das helyOS®-Framework als Open Source zu veröffentlichen und für nicht-kommerzielle Anwendungen kostenfrei bereitzustellen. Parallel dazu ist die Entwicklung eines Nutzungsmodells vorgesehen, das den Anforderungen der Industrie gerecht wird.
Beispiel einer Web-basierten Leitstandsoftware mit helyOS® inside:
4.3 BLE Objektlokalisierung
ZF CV Systems GmbH untersucht im Rahmen des Projektes die Einsatzmöglichkeiten Bluetooth-basierter Objektlokalisierung (BLE). Mit den neuesten Bluetooth-Standards werden verschiedene Tracing- und Ortsbestimmungstechnologien wesentlich umfangreicher unterstützt. Die Technologie könnte eine sinnvolle Erweiterung der Überwachung von Räumen im Nahfeldbereich (bis ca. 10 m) aufgrund der einfachen Handhabbarkeit und geringer Kosten darstellen. Mit Hilfe spezieller Antennenauslegungen wird Objekterkennung und -verfolgung mit hohen Genauigkeiten realistisch.